


It has been a repeat of reminding myself to update my blog and forgetting it; after two busy months, I can correct it.
How are you doing?
I've been working on Angel Ring for a while, and I think my first prototype is finished! I finished it a month ago, but I was too busy to write a blog about it. Of course, I need to check in with my teacher if we can use our prototype as our first angel ring, since it may have some errors.
Along with the angel ring, I am planning on working on different things, like reworking the materials used, because right now, our robots look old and wiggly. I am planning on using my teacher's 3D printers to solve this problem.
Also to change the motors along with the tires, because what's the point of having an enhanced color sensor if you have slow and janky motors?
If we have the chance, our team might add dribblers as well, which are rolling machines that roll so fast they can catch the ball, and roll it back to kick it.
(image of a dribbler from google)

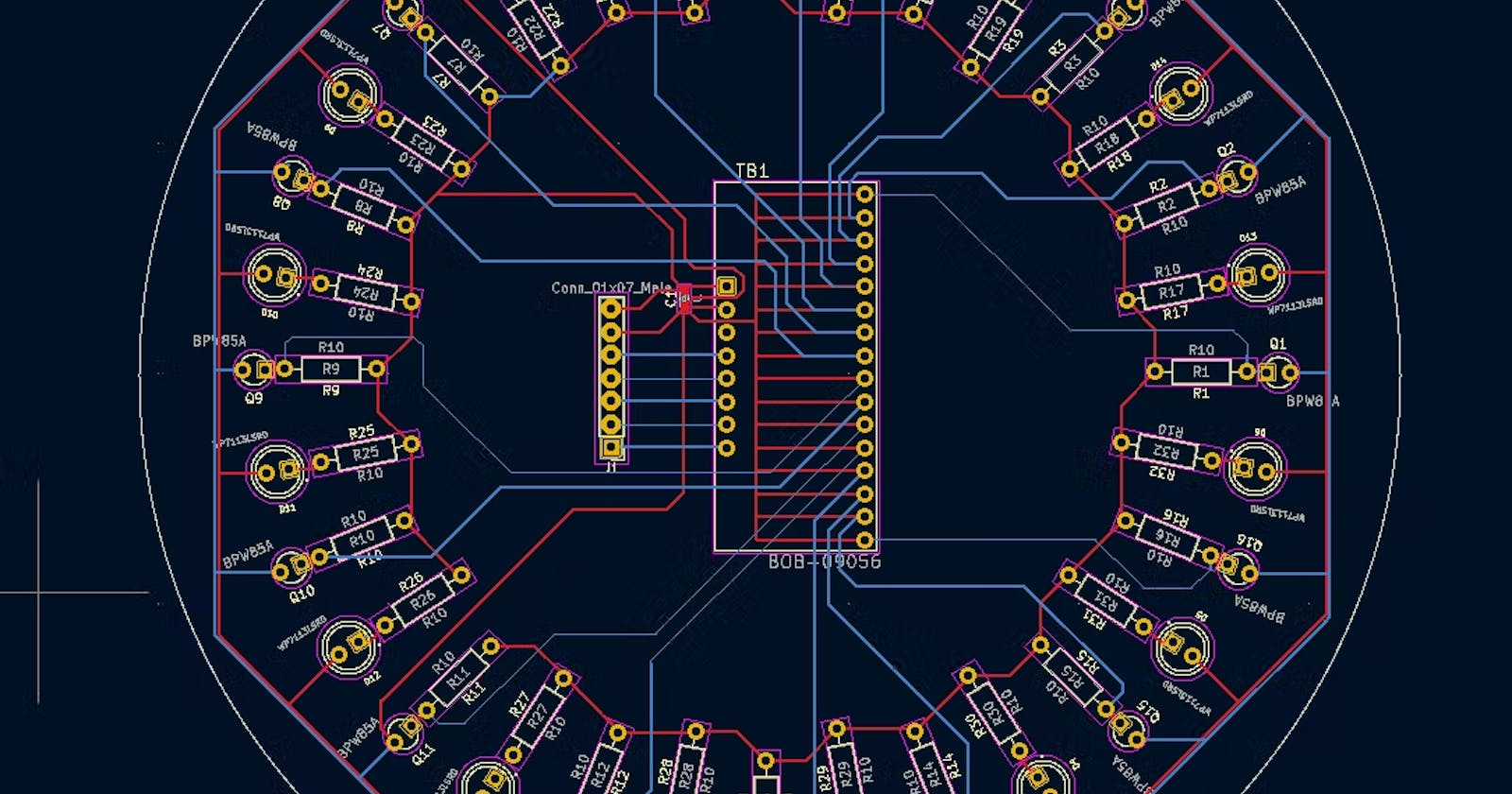
Back to Angel Rings. let me show you how it looks on KiCad right now.
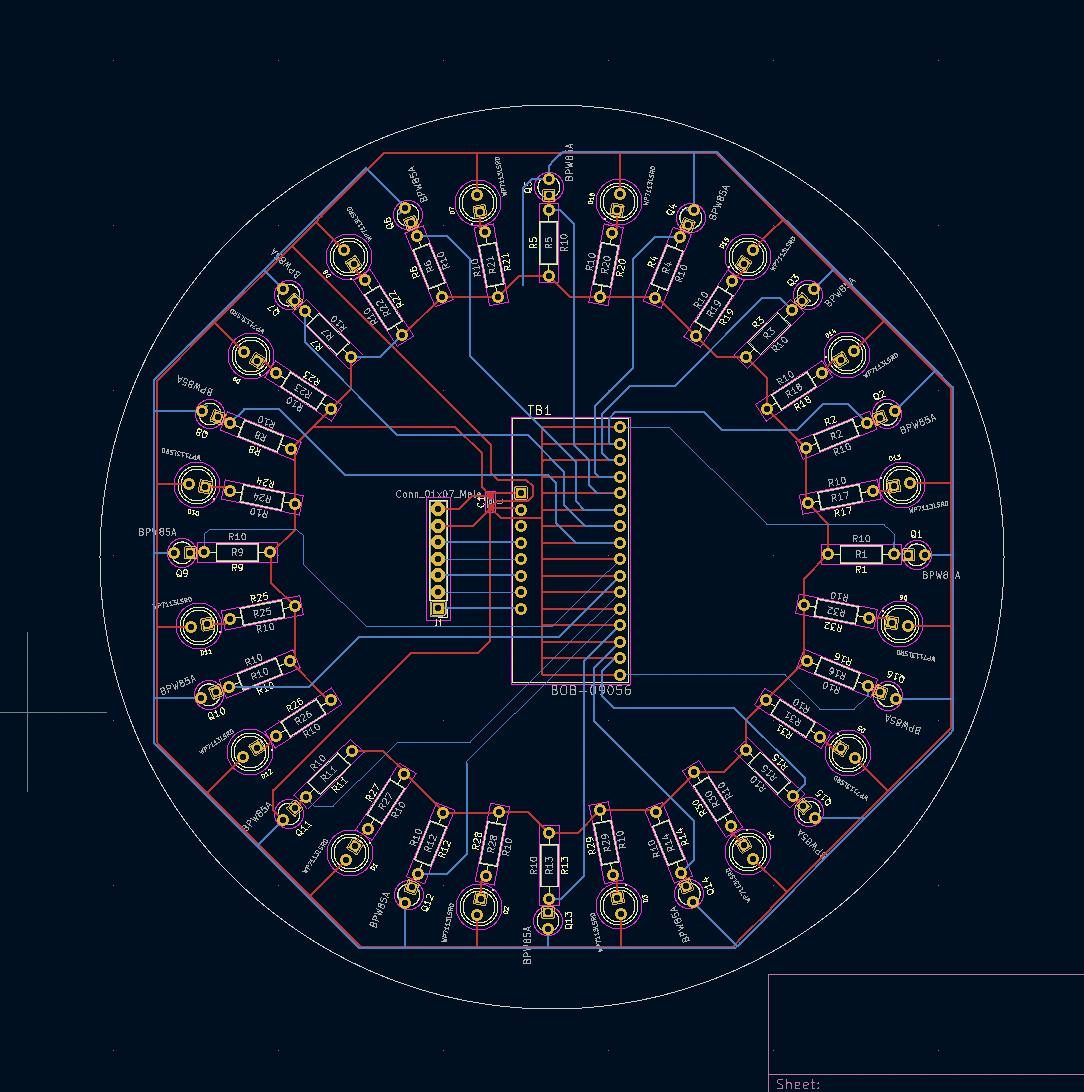
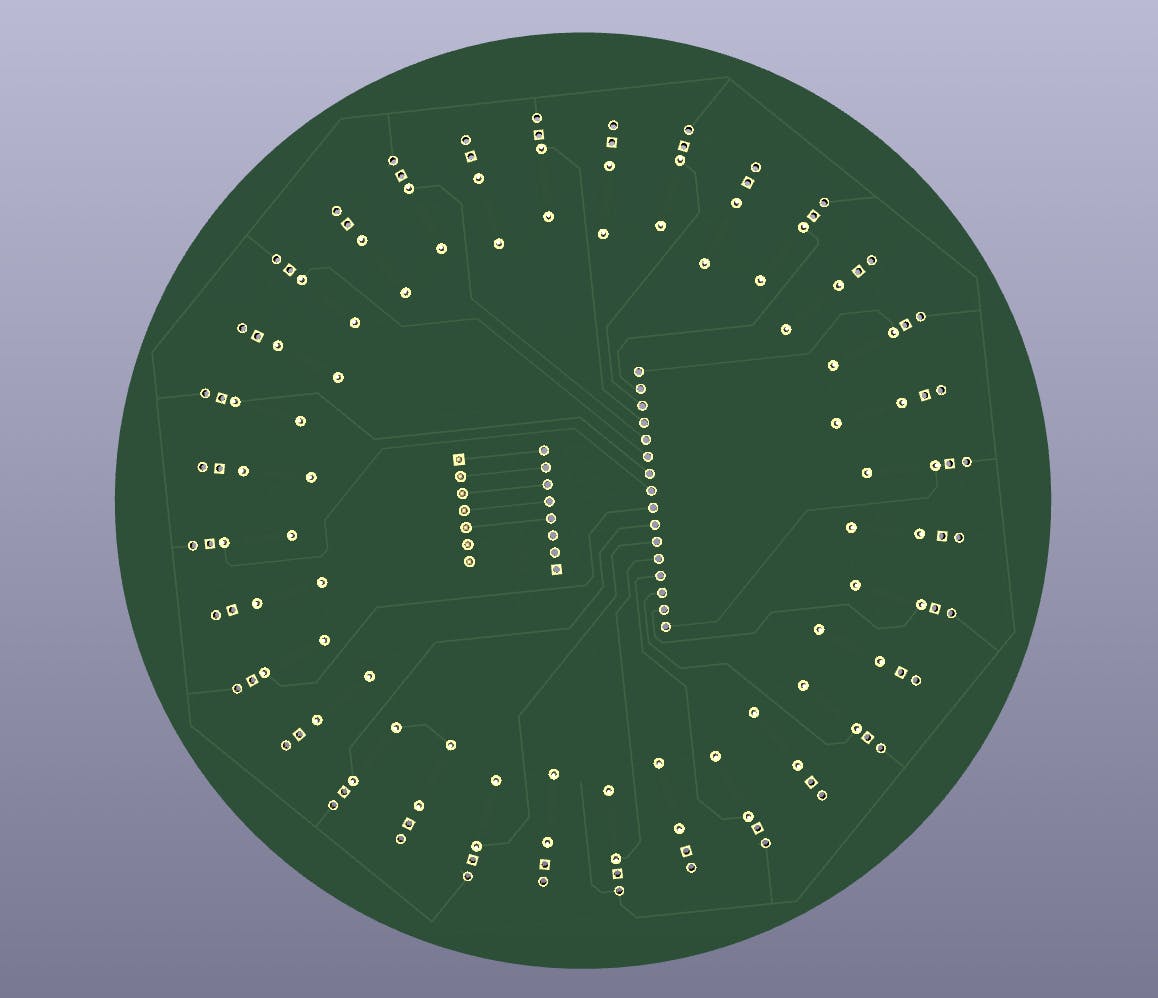
It may look very confusing, and I understand. The thin blue and red lines are the wires that are going to connect one to another. The reason some of them are on top of one another is that red lines are going to show up on the front, and the blue lines are going to show up on the bottom of the board, so a red line on a blue line does not mean they are connected. the big box in the middle is the chip that will connect all 16 color sensors. You may ask, "16? there are 32!" half of them, or the smaller circles are the color sensors, and the 16 bigger circles are the LED. LED is added because it is better for the color sensors to see the color that they are seeing. The long rectangular big near the big one is for the main robot to connect to the angel ring. Here are the 3D views.
Front:
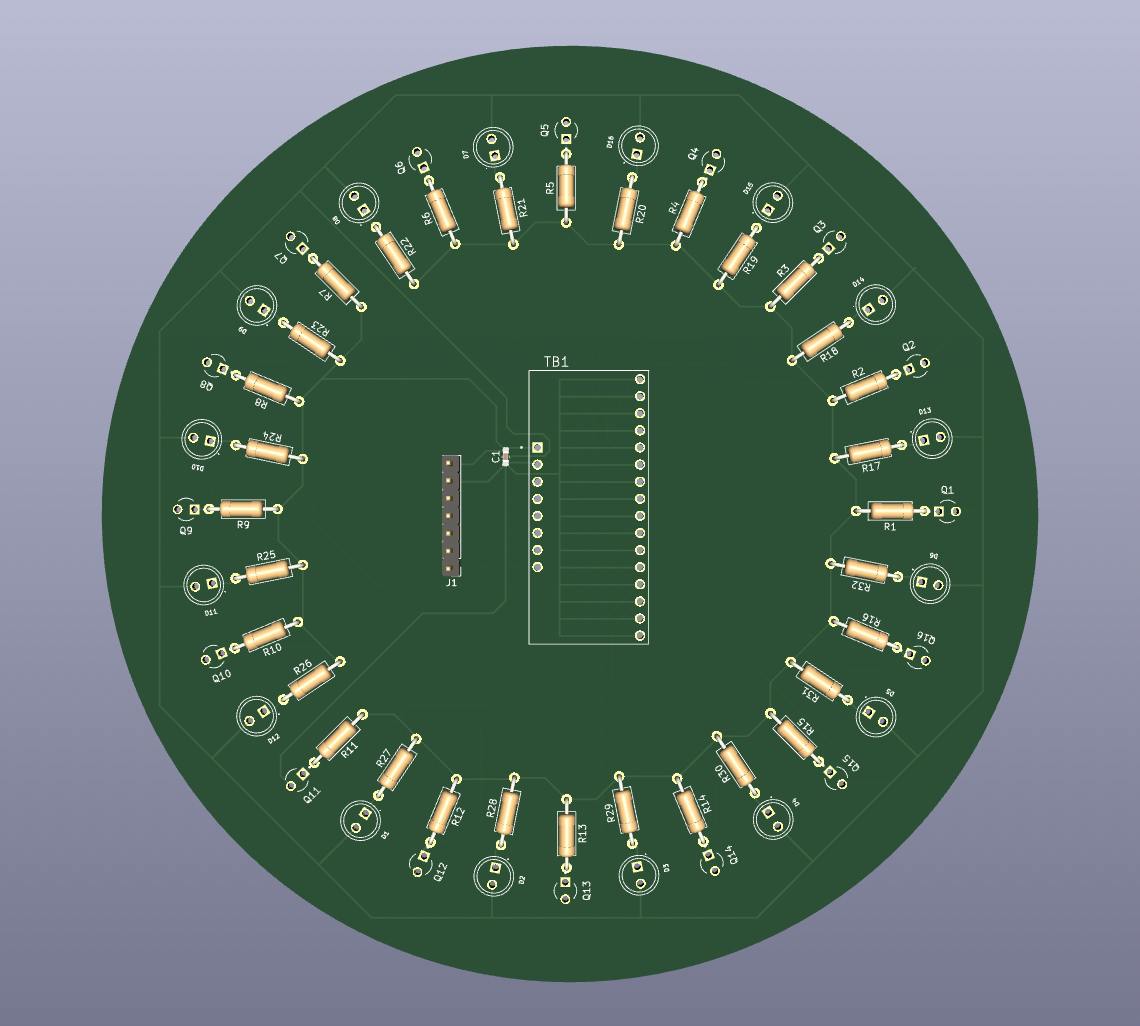
Back:
Thanks for reading!