


Hello!
Wow, it has been a long time since the last time I wrote my blog, lol. My new school year started, and it is already difficult. It just gets harder and harder.
Now let's talk about robotics. My robotics teacher suggested we (me and my partner, Noda) improve our color sensor. At first, I disagreed; I thought the speed of the robot was everything. However(and thankfully), I realized that the speed of the robots isn't the main factor that makes them strong. Even if it is fast, if the line sensors can't catch up to the speed and go out of the white line, the robot is just going to be a burden. I was lucky enough to encounter a good example in the national cup, where one of the teams I competed against had robots so so fast I thought they were using F1 motors. However, it was too fast for the robot to control itself, and it would usually go out of the white line and even did multiple own goals which lead to our team's victory.
So, my partner and I are planning on changing our line sensors, and putting them in an alignment called the "angel ring." We were inspired by that idea of many teams(professional ones), as we thought it is a better way to align our line sensors than aligning them like a cross right now. Photo of a robot(not ours) with the angel ring
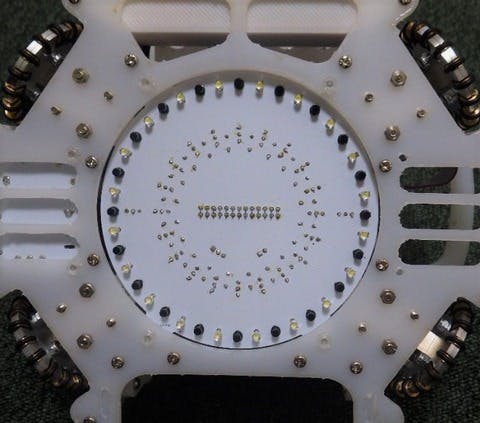
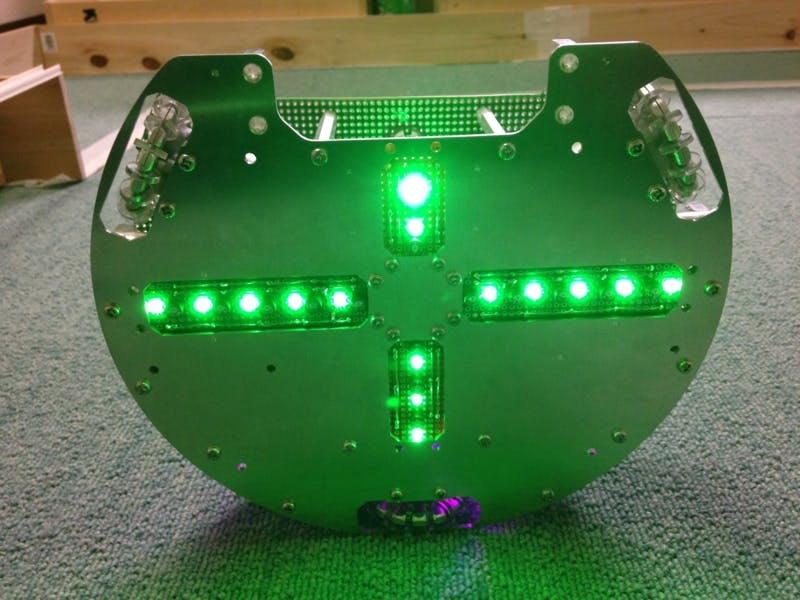
Photo of a robot(not ours, again) with the cross alignment
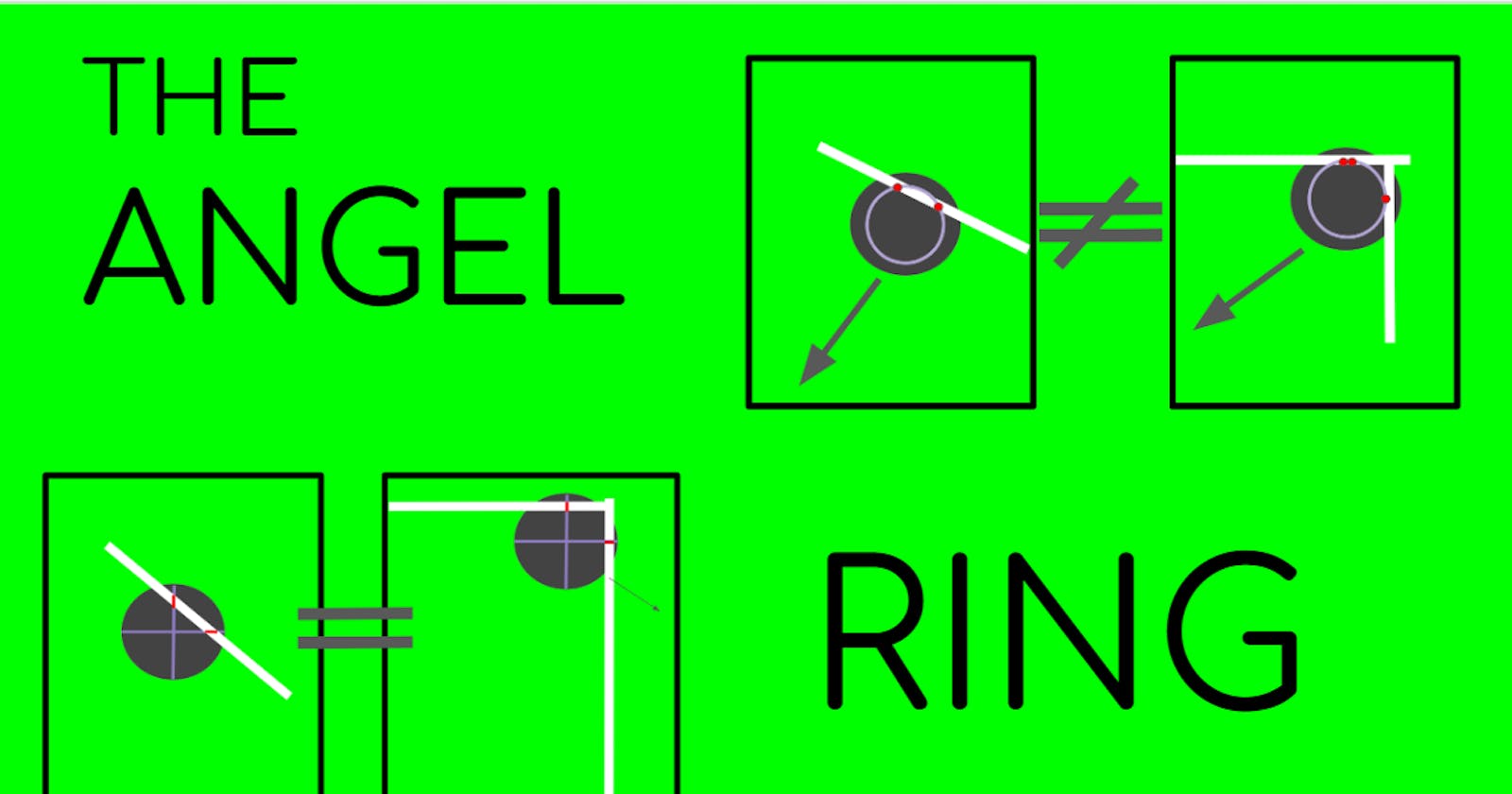
Now, why is the angel ring better than the cross? This is because if you use the cross, even though the situation is different, the same color sensors might be detecting the white line. Here is a digital sketch I drew:
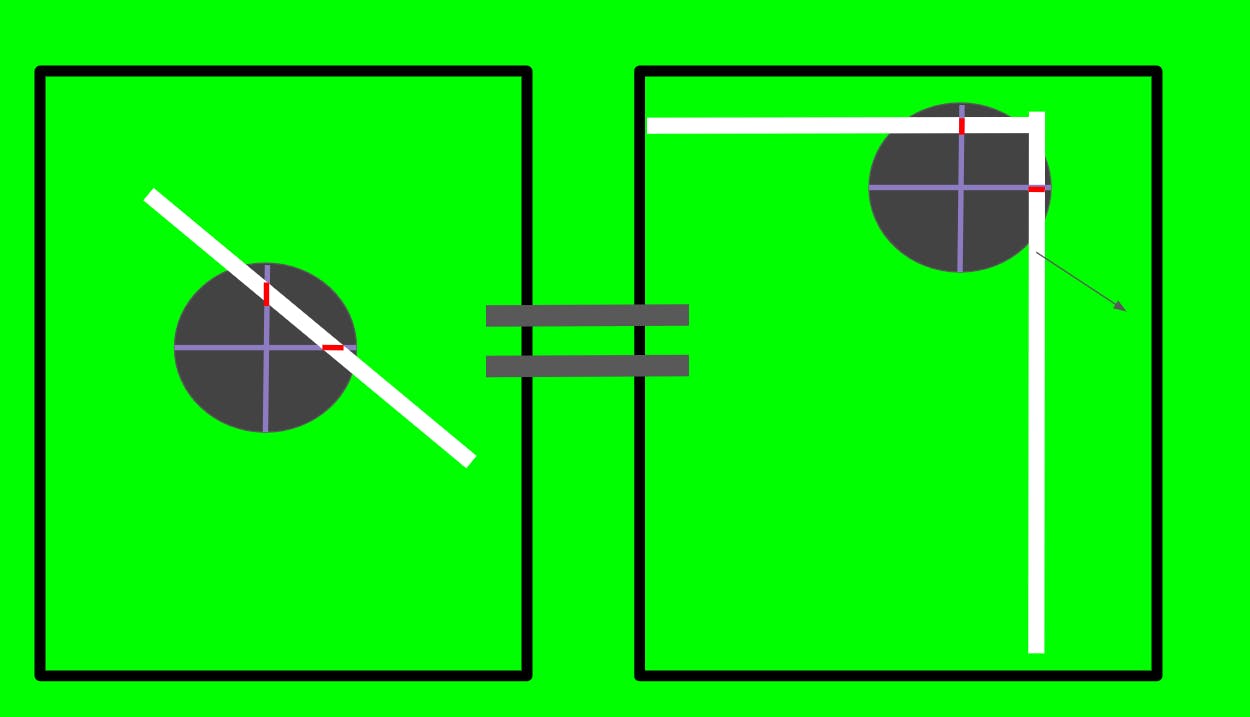
The purple line is where the line sensors are aligned, and the red line is the line sensors that detect the white line. As you can see, even though they are completely different scenarios, the white line is both detected by the same line sensors, thus will get the robot out of the white line.
How about angel ring? With the angel ring, the same color sensors reacting in different situations would be prevented. Here is an image for a better understanding:
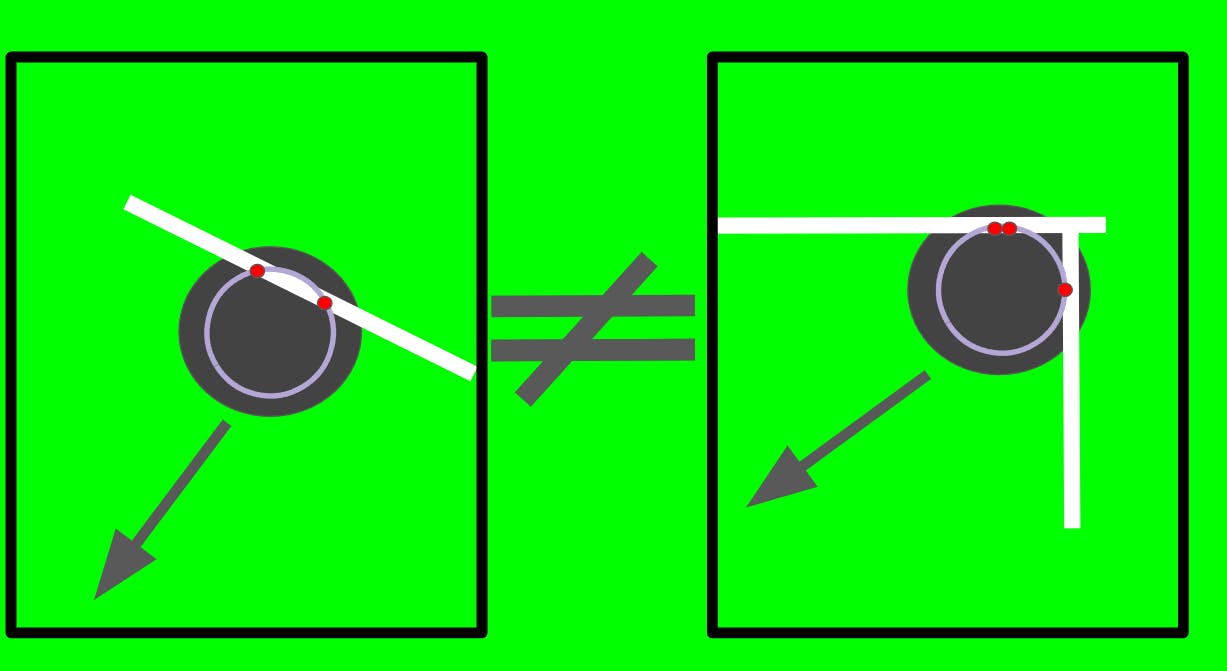
The red circles are the line sensors detected. With the angel ring, the color sensors will be able to differentiate scenarios, thus preventing even more possibilities of going over the white line.
I think making the angel ring is going to be a challenging obstacle for our team. However, it will be a huge upgrade for our robots, because what's the point of making a fast, smart robot if it goes over the white line all the time?
I hope you enjoyed reading it, see you soon!